
どうも、バイト戦士です。
今回はAmazonで人気のサーボモータであるDS3218を購入しました。レビューしてみます。
サーボモータDS3218について
今回購入したのは以下の商品。

ハイパワータイプのサーボモータです。
Arduinoによく使われているサーボにはSG90という有名機種がありますが、正直パワーがしょぼい。
SG90のトルクは1.8kgf、DS3218のトルクは20kgf、パワーはだいたい11.1倍です。
まぁサイズもそこそこでかいんで、ロボクラフト向きかも。
☆開封☆
早速開封していきます。
今回は静電気防止の電子部品包装的な袋に入って届きました。今回は4つ購入。

それぞれ広報相されています。

一つのセットに入っている内容物は以下の通り。
・サーボDS3218本体
・金属製サーボホーン:1コ
・プラ製サーボホーン:4コ
・サーボ固定用ゴムブッシュ:4コ
・サーボ固定用ネジ:4コ
・ハトメ:4コ
・金属製サーボホーン用ねじ:2コ
そこそこ値段がするだけに、オプションはかなり贅沢ですね。

サーボに接続された通信・電源ケーブルの長さは以下の通り。
大体サクラクリップ2本分といったところ。
サーボホーンの質感はかなりいい感じ。

若干つや消しの丁寧な加工で、かなり高級感があります。サーボにアームを固定するためのねじ穴も切ってあります。

剛性に関しては文句なしです。

サーボを分解
せっかくなのでサーボモータ内部の品質も確認してみたいと思います。
サーボ後部のフタは4か所ねじ止めされています。+ドライバーで外すことができます。

筐体の構成は以下の通り、真ん中が金属製カウル、上下にプラ製のフタ、下のフタからねじで固定する、そんな構造になっていました。

ねじにはゴムブッシュが取り付けられており、ねじ穴から水が入らないような構造になっています。
水没は厳しそうですが、生活防水レベルなら問題なさそう。

ギアの質感は以下の通り。フルメタルです。
左下を見ると軸受けにはボールベアリングが採用されているとわかります。
摩擦タイプの軸受じゃないのは正直驚き。内部の剛性もかなり高そう。
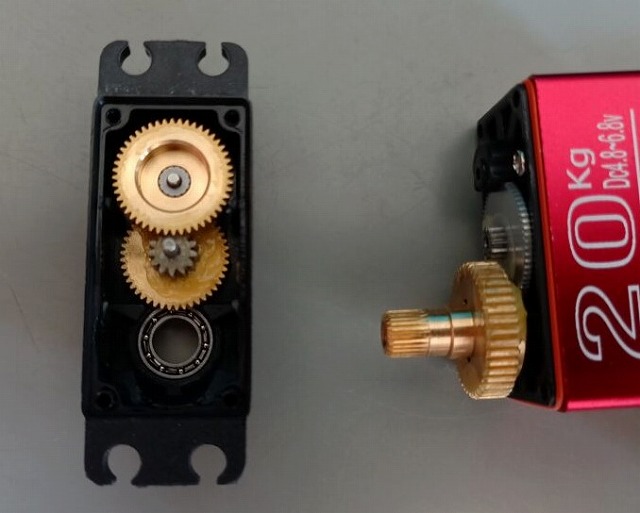
ギア部分の下にはモータ、エンコーダ、基板の3つが入っています。

フタにはオレンジ色のパッキンが組み込まれていました。防水への配慮を随所に感じます。
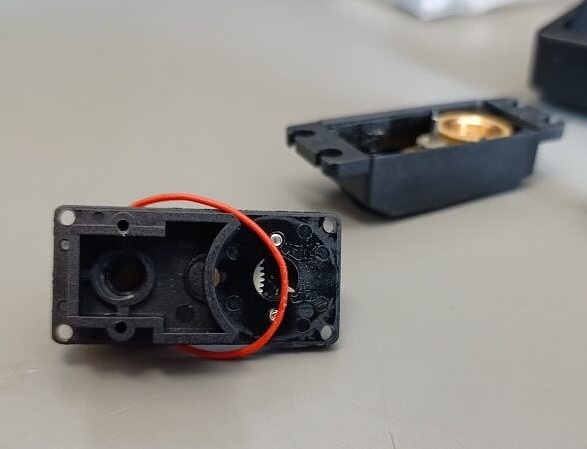
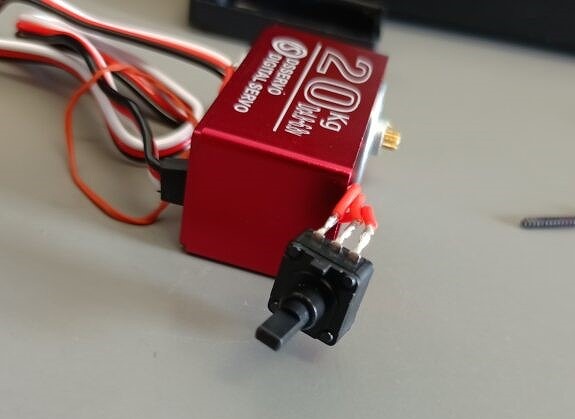
エンコーダは小型のものが採用されていました。基板ではなく直接線で実装されているので修理はしやすそうです。
今回の商品は270度モデルですが、エンコーダの回転は内部で機械的に止まるようになっているので、改造次第では360サーボにすることもできそうです。
まとめ
今回はDS3218を購入して使ってみました。
パワーはまぁ、、、強いです。
筐体の作りはSG90がおもちゃ向けならこれはロボット向けって感じ。
価格は製品の質に見合っているという印象。(高すぎないし安くもない感じ)
フルメタルギアなので耐久性は問題ないかと思います。
それでは、また。